A Decision Support Tool for Accommodating Right-Turning Trucks at Urban Intersections in Walkable Communities
Publication: Journal of Transportation Engineering, Part A: Systems
Volume 148, Issue 10
Abstract
Many North American jurisdictions are creating walkable urban environments through compact Complete Streets (CS) geometric designs, while not addressing the mobility and accessibility of goods despite the essential role goods movement plays in sustaining the liveability of the community. Prescriptive curb radii limits recommended by CS guidelines to lower pedestrian crossing distances may not adequately accommodate the right-turn maneuver of a truck. The paper develops a performance-based decision support tool to guide the design of urban intersection curb radii that facilitate the safe and efficient accommodation of trucks and pedestrians. The decision support tool relies on a novel Freight-Walkability relationship to define the context of urban intersections and establishes a curb radius design domain. A case study demonstrates the quantification of the Freight-Walkability relationship (in terms of peak hour right-turning truck volumes and a proposed Walkability Index) and the application of the tool at an existing intersection in Winnipeg, Canada. The tool helps transportation engineers and planners balance the mobility needs of trucks and pedestrians through short-term street-level design changes and long-term land use transformations.
Introduction
The integration of trucks and pedestrians in urban areas presents unique geometric design challenges due to their conflicting needs as users of the same transportation system. Many North American jurisdictions are creating liveable urban environments by prioritizing the needs of pedestrians through compact and walkable urban designs that provide access to employment, services, and recreational opportunities (FHWA 2010; Young and Hermanson 2013; Appleyard et al. 2016; TAC 2011; Williams and Carroll 2015). Implementation of liveability initiatives, however, may disregard the operational needs of trucks delivering goods to these communities. In some cases, this has constrained the mobility and accessibility of trucks in urban areas, despite the essential role goods movement plays in sustaining the liveability and economic prosperity of the community (Wygonik et al. 2015; OECD 2003; Bassok et al. 2013; Williams and Carroll 2015).
The Complete Streets (CS) design approach, a prominent example of a liveability initiative, recommends geometric design parameters conducive to the needs of pedestrians and cyclists, which can exacerbate the accessibility issues of trucks in urban areas (Wygonik et al. 2015). For example, pedestrian-friendly CS designs recommend tighter corner radii (typically 3 m) and narrower travel lanes (sometimes as narrow as 3 m) to reduce pedestrian crossing distances. These features constrain the maneuverability of right-turning trucks, which require curb radii and lane widths that accommodate low-speed off-tracking and swept path width (Wygonik et al. 2015). Consequently, these environments may necessitate wide turns that encroach into an adjacent lane to prevent the rear trailer from climbing curbs and hitting pedestrians, curb-side objects, or other vehicles (Harwood et al. 2003; USDOT 2000). More generally, the lack of adequate truck accommodation can disrupt traffic operations, which leads to congestion, safety problems, environmental impacts, and negative perceptions of trucks in urban areas (OECD 2003; Williams and Carroll 2015).
Although the National Complete Streets Coalition (NCSC) promotes a comprehensive policy model that includes the specification of all modes and all users as one element of the policy, the minimum requirement is the inclusion of bicyclists and pedestrians (Smart Growth America 2016). Whereas numerous CS guidelines exist, a comprehensive review by Moshiri (2020) concludes that few identify the need to accommodate urban goods movement, the circumstances when designs should prioritize certain modes over others, and the design trade-offs that should be considered when making modal prioritization decisions involving trucks. Certain publications have addressed the design issues for trucks in urban areas (Conway 2018; City of Portland 2008); however, in keeping with the emergence of performance-based or reliability-based geometric design approaches (Musunuru et al. 2019; Neuman et al. 2017), there remains a need for detailed guidance on how to select values for parameters from acceptable design domains or ranges that appropriately accommodate the needs of trucks operating in liveable urban areas.
This paper addresses the development of a decision support tool for selecting an appropriate intersection curb radius based on the relative priority given to freight activity and walkability in an urban area. The tool applies a novel Freight-Walkability (FW) relationship to support modal prioritization between trucks and pedestrians and establishes an appropriate range of values (i.e., a design domain) for an intersection curb radius. Specifically, the objectives of the paper are: (1) to conceptualize and quantify the FW relationship using data pertinent to the selection of an intersection curb radius; and (2) to determine the domain of intersection curb radii that could be considered for various land use contexts, intersection configurations, and design vehicles. The paper demonstrates the quantification of the FW relationship and the application of the decision support tool through a case study in Winnipeg, Canada.
The tool developed in this paper is considered transferrable in two main respects. First, whereas the tool is applied to the curb radius design parameter, it could be adapted for other parameters (e.g., lane width). Second, the paper quantifies the FW relationship for a specific urban jurisdiction in Canada; however, the concept could be transferred to any jurisdiction facing similar challenges.
The next section of this paper describes the FW relationship used to establish the modal priority for an intersection. The third section describes the decision support tool for selecting a context-sensitive intersection curb radius. Then, the fourth section presents the case study to demonstrate the application of the tool. The paper closes with a discussion of key findings and conclusions.
Freight-Walkabilty Relationship
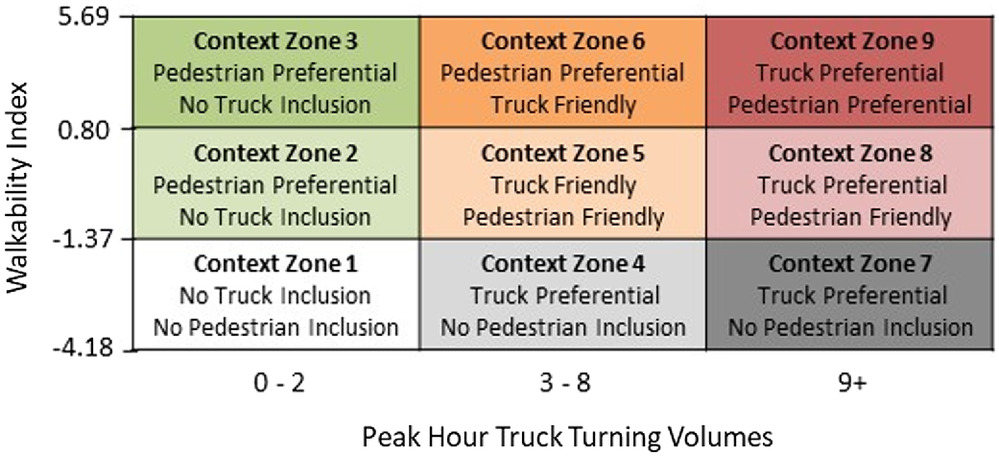
The FW relationship, shown schematically in Fig. 1, provides guidance about the degree to which the needs of trucks and pedestrians should be prioritized. The prioritization consideration depends on the characterization of freight activity and walkability. These variables are purposely generic by nature; thus, the freight and walkability axes can be quantified differently depending on the application context of the relationship and the parameters being measured. The relationship can be utilized to guide the context-sensitive development and implementation of land use and zoning plans, street design elements (e.g., intersection configurations, right-turn treatments, and curb bulbouts), operational features (e.g., traffic control devices and signal phasing), and management considerations (e.g., parking and access management) (FDOT 2015). The FW context zones can be applied to existing freight movement and walkability conditions, predicted future conditions, or desired conditions.
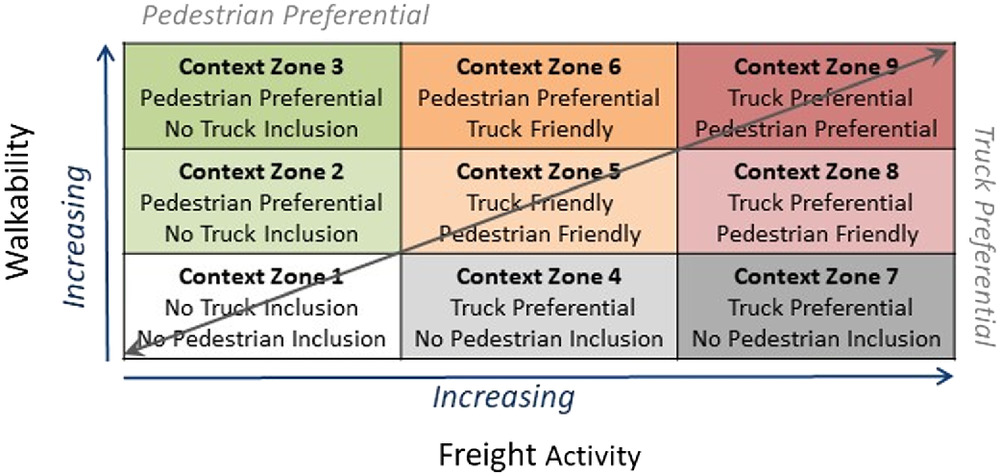
The FW relationship developed in this paper extends the Freight Activity and Land Use Compatibility Analysis (FALUCA) tool developed by the Florida Department of Transportation (FDOT 2015), which relates and characterizes freight activity and liveability. FDOT (2015) characterizes four general areas based on the freight-liveability relationship: low activity areas, community-oriented areas, freight-oriented areas, and diverse activity areas. The FW relationship follows the FALUCA characterization of context zones; however, it focuses on walkability instead of the broader liveability concept. This focus emphasizes the specific geometric and operational design challenges that arise from the interaction of pedestrians and trucks in urban areas, and facilitates the selection of design parameters based on the measured or anticipated level of activity for both modes. In this way, designers can make context-sensitive decisions that appropriately balance the accommodation of these modes.
The freight activity and walkability axes in the FW relationship, shown in Fig. 1, each include three categorical levels: low, medium, and high. The level of emphasis on freight or pedestrian movement in the planning, design, operation, and management of the transportation system reflects the level of current or future/desired freight activity or walkability. For each mode, treatments corresponding to the low, medium, and high categories are considered noninclusive, friendly, and preferential, respectively. The combination of the freight activity level and walkability level determines the category of treatment that should be provided based on the modal priority. The following points further describe the three categories of treatments in the FW relationship:
1.
No inclusion: Areas with low measured or expected levels of freight activity typically do not require accommodations for large trucks (i.e., no truck inclusion is required). Rather, these areas may need to accommodate the operation of smaller single unit trucks or delivery vehicles. Similarly, areas with low measured or expected walkability levels require a lower level of accommodation of pedestrians throughout the network, which enables them to maneuver satisfactorily through the system designed to the practical lower limits of street design parameters. Non pedestrian inclusive treatments would be considered in areas with no walkability, where pedestrians are either prohibited or minimal support is provided. Areas with low freight activity are typically designed for medium single unit trucks (City of Toronto 2017) or passenger vehicles (FDOT 2015) as the modal priority. An area with low freight activity and low walkability is either an undeveloped area or an area that is not adequately designed for pedestrians or trucks. In this case, the infrastructure and land use design may need to be modified to increase either walkability or freight activity or both.
2.
Friendly treatments: Areas with medium levels of freight activity where pedestrians are the modal priority require truck-friendly treatments, such that truck movements are accommodated but not designed-for. Although large trucks are not the modal priority in these areas, they are able to operate on the network with some operational or regulatory constraints. Similarly, areas with medium walkability levels where pedestrians are not the modal priority require pedestrian-friendly treatments, such that the infrastructure accommodates pedestrian movements. These areas would typically be designed to the recommended limits of design standards, while not exceeding standard limits. Areas with medium levels of both freight activity and walkability require a compromise between the truck-friendly and pedestrian-friendly treatments to balance the needs of the two modes. These are mixed-use areas with moderate multimodal presence.
3.
Preferential treatments: Areas with higher levels of freight activity than walkability require truck-preferential treatments, where the roadway network is planned and designed with trucks as the modal priority. Similarly, areas with higher levels of walkability than freight activity require pedestrian-preferential treatments, where the infrastructure is designed with pedestrians as the modal priority. Areas with both high freight activity and walkability require a compromise of the truck-preferential and pedestrian-preferential treatments to balance the needs of the two modes. These are mixed-used areas with significant multimodal presence.
As will be described in the subsequent sections, the FW relationship underpins the design of intersection curbs that facilitate the safe right-turn maneuver of trucks while minimizing the crossing distance for pedestrians. Within the scope of urban intersection design, a truck preferential design would feature a wider curb radius that allows the simple right-turn maneuver of a large truck (tractor-semitrailer) from the curb lane without requiring encroachment into adjacent or opposing lanes or oversteering of the vehicle. However, a wider curb radius results in an increased crossing distance for pedestrians and the placement of intersection ramps that are not aligned squarely with the crossing. A pedestrian-preferential design would minimize the curb radius to reduce the crossing distance of a pedestrian and consequently their time of exposure to vehicular traffic. Such a design would be considered truck noninclusive, because trucks would have difficulty completing a curb lane right-turn maneuver without mounting the curb or making multiple maneuvers at the intersection. Given this conflict, the selection of curb radii considered truck-friendly and pedestrian-friendly depends on the intersection context characteristics and configuration.
Decision Support Tool for Intersection Curb Radius Design
This section describes a decision support tool to guide the selection of the urban intersection curb radius required to accommodate trucks and pedestrians based on their level of modal priority, as determined by the FW relationship. Fig. 2 shows the steps used in the decision support tool to select a curb radius that is suitable to the FW context. A detailed description of each step follows.
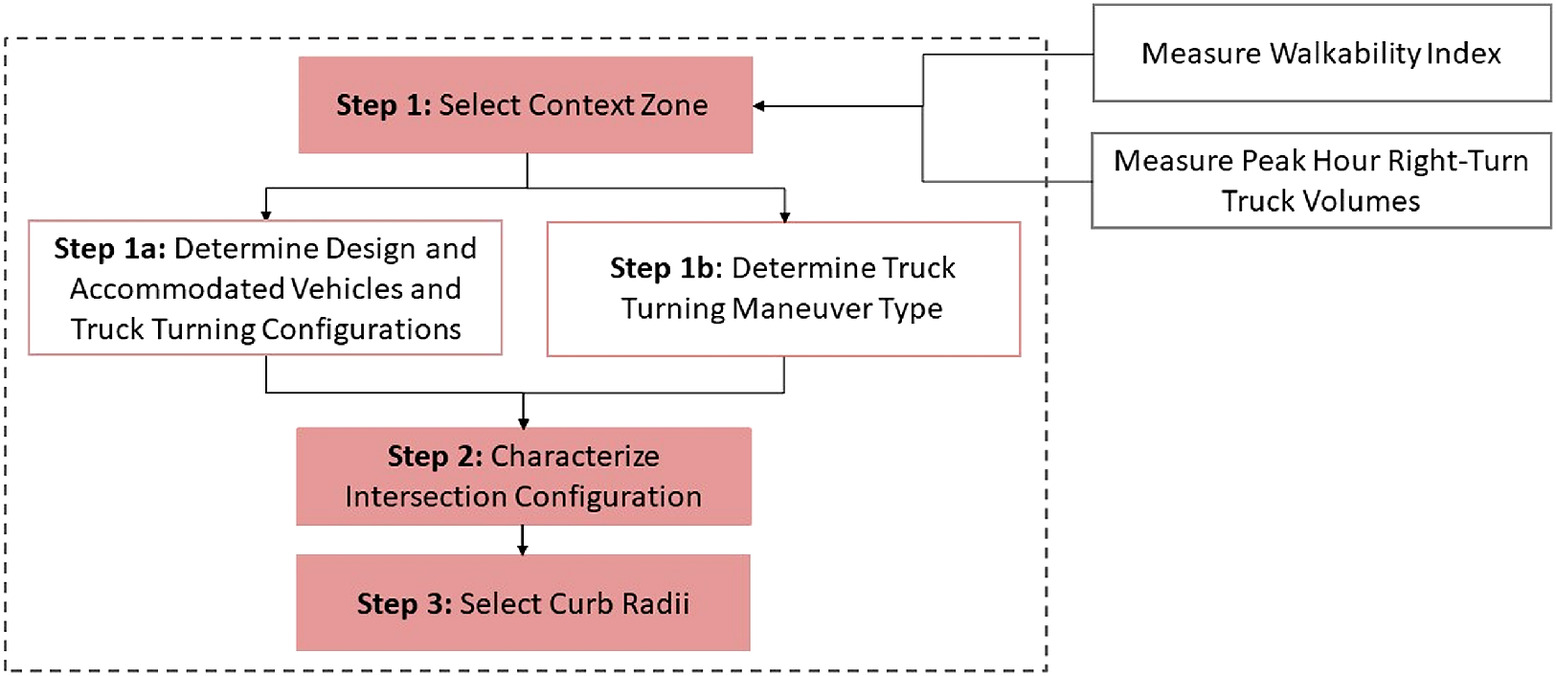
Step 1: Select the Context Zone
The user of the tool (normally a designer or practitioner) determines the context zone of an urban intersection based on the level of walkability and freight activity currently evident or expected/desired at the intersection. As described earlier, the FW relationship could be quantified or characterized using existing, planned, or desired conditions, with the scale of the axes varying by jurisdiction. For the context of this paper, the tool proposes to measure walkability using the Walkability Index (WI) developed and validated by Moshiri (2020). That index considers a weighted amalgamation of safety, accessibility, and connectivity indicators. Likewise, the level of freight activity is measured in terms of the peak hour right-turn truck volume (Moshiri 2020). Truck-turning volume is used as the indicator for freight activity because it directly measures truck movements relevant for curb radius design; these data were available city-wide. Further research could be conducted to develop a freight activity index to consider additional factors such as traffic volumes (i.e., severity of disruptions to traffic), sociodemographic and economic characteristics, and urban form characteristics (e.g., commercial land use characteristics and the presence and intensity of industrial land uses and freight activity centers) (Sahu et al. 2020; FDOT 2015).
The context zone characterizes the urban environment surrounding the intersection to guide the prioritization of modal needs in street design and, in cases of equal prioritization, to support the compromise in street design to accommodate the needs of both modes. The selection of the FW context zone influences Steps 1a and 1b, respectively, which define:
1.
the design vehicle and accommodated vehicle that must be able to complete a right-turn maneuver at an intersection and the truck turning configurations (i.e., number of occupied lanes); and
2.
the truck right-turn maneuver type (i.e., oversteer or no oversteer).
Step 1a: Determine the Design Vehicle, Accommodated Vehicle, and Truck Turning Configuration
In this substep, the designer determines the design vehicle and accommodated vehicle (based on the level of freight activity), and the number of receiving lanes the vehicles can occupy (based on the level of walkability). Table 1 outlines the truck turning configurations specified for the design and accommodated vehicles in each context zone, from the vehicle’s starting position in the approach leg to the final position in the receiving leg, up to a maximum number of available lanes.
| Context zone | Truck turning configuration of design and accommodated vehicles |
|---|---|
| Context zone 1 | No truck inclusion because of low freight activity; provide minimum curb radius. |
| No truck inclusion | |
| No pedestrian inclusion | |
| Context zone 2 | No truck inclusion because of low freight activity; provide minimum curb radius. |
| Pedestrian preferential | |
| No truck inclusion | |
| Context zone 3 | No truck inclusion because of low freight activity; provide minimum curb radius. |
| Pedestrian preferential | |
| No truck inclusion | |
| Context zone 4 | Design vehicle: WB20 (curb lane—curb lane; no oversteer). |
| Truck preferential | |
| No pedestrian inclusion | |
| Context zone 5 | Design vehicle: HSU (curb lane—up to two lanes; no oversteer). |
| Truck friendly | Accommodated vehicle: WB20 (2nd lane—up to two lanes; no oversteer). |
| Pedestrian friendly | |
| Context zone 6 | Design vehicle: HSU (curb lane—up to two lanes; oversteer). |
| Pedestrian preferential | Accommodated vehicle: WB20 (2nd lane—up to two lanes; oversteer). |
| Truck friendly | |
| Context zone 7 | Design vehicle: WB20 (curb lane—curb lane; no oversteer). |
| Truck preferential | |
| No pedestrian inclusion | |
| Context zone 8 | Design vehicle: WB20 (curb lane—up to two lanes; no oversteer). |
| Truck preferential | |
| Pedestrian friendly | |
| Context zone 9 | Design vehicle: WB20 (curb lane—up to two lanes; oversteer). |
| Truck preferential | |
| Pedestrian preferential |
A design vehicle is a frequent user of a street or network and must be fully designed-for to allow its operation (NACTO 2013). An accommodated vehicle is an occasional or infrequent user of a street or network, which can operate on and maneuver through the street or network with some constraints (NACTO 2013). Thus, less space is provided for an accommodated vehicle to complete a turn. Depending on the context zone, this paper uses the heavy single unit truck (HSU) and tractor-semitrailer truck with a 53-ft (16.2-m) semitrailer (WB20) specified by the Geometric Design Guide for Canadian Roads (TAC 2017) as the design vehicle and accommodated vehicle, respectively. The truck turning configurations specified in Table 1 extend existing design practice by building on the configurations outlined in the City of Toronto’s Curb Radii Guideline (2015). Generally, starting and ending in noncurbside lanes, and oversteering allowances, result in the vehicle occupying more of the intersection space to complete a turn, thus reducing the curb radii and intersection size.
The design and accommodated vehicles determine the truck turning configurations in terms of the vehicle’s starting position in the intersection approach leg. The design vehicle should be able to complete a right-turn starting from the lane closest to the curb, whereas the accommodated vehicle should be able to complete a right-turn starting from the second lane closest to the curb, thus providing more space in the intersection for the vehicle to turn and reducing the required curb radius. Consequently, as shown in Table 1, the WB20 is the design vehicle in context zones that require truck preferential treatments (i.e., zones 4, 6, 7, and 9), whereas the HSU is the design vehicle and the WB20 is the accommodated vehicle in the context zones that requires truck-friendly treatments (i.e., zones 5 and 6). Trucks are not considered for context zones 1, 2, and 3; in these cases, the intersection would be designed for pedestrians as the modal priority (i.e., the curb radius would be minimized).
The level of walkability determines the maximum number of receiving lanes that the vehicle can occupy in its final position (i.e., the target receiving lane). A high walkability context zone requires pedestrian-preferential treatments, which can be achieved by allowing the design and accommodated vehicles to occupy a higher number of receiving lanes to reduce the curb radius and the pedestrian crossing distance. A low walkability context zone prioritizes other modes; thus, the design and accommodated vehicles would be able to complete a right-turn into the receiving curb lane.
For example, an intersection in context zone 7 (high freight activity and low walkability) should be designed to prioritize truck movements by allowing the WB20 design vehicle to complete a right-turn from the approach curb lane to the receiving curb lane. These areas of low pedestrian activity would either prohibit pedestrian crossings or would provide pedestrian refuge islands or medians to reduce the pedestrian crossing distance. If the intersection experienced moderate pedestrian activity (i.e., context zone 8), trucks should still have modal priority, but a compromised design should allow the right-turn maneuver of a WB20 design vehicle from the approach curb lane to occupy up to two receiving lanes. This allowance would reduce pedestrian crossing distance. Conversely, an intersection in context zone 6 (medium freight activity and high walkability) should be designed for an HSU but still accommodate a WB20 with some operating constraints (i.e., a start from the second approach lane). In this case, both vehicles would be allowed to occupy up to two receiving lanes, thus reducing the intersection crossing distance for pedestrians.
Step 1b: Determine the Truck Turning Maneuver Type
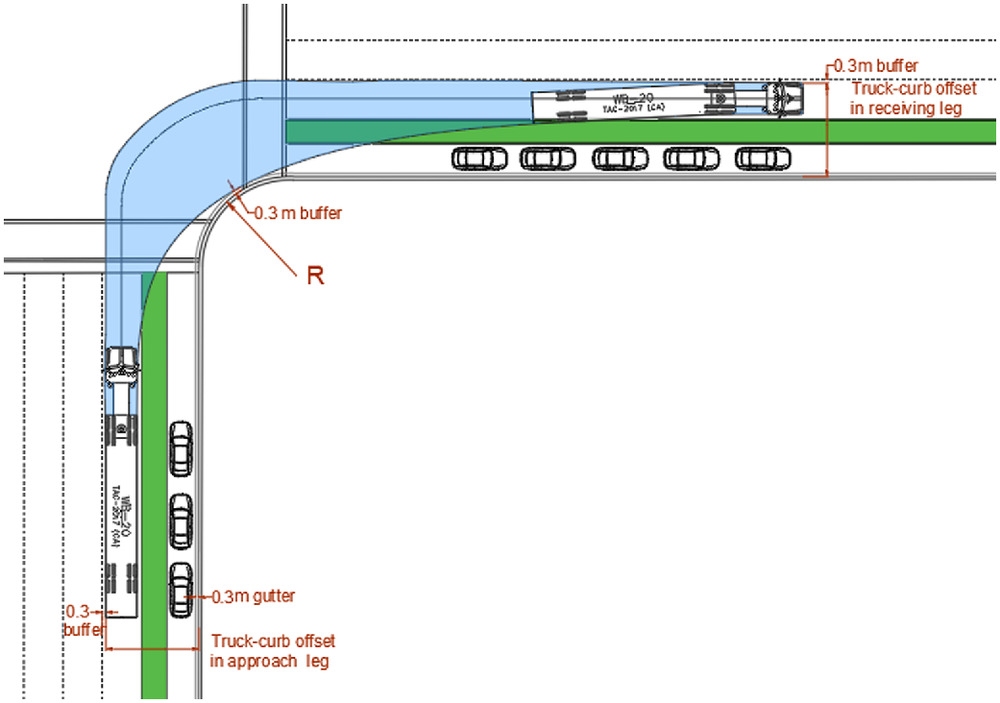
In this substep, the designer determines whether a vehicle is required to oversteer as an additional method of reducing an intersection curb radius. As shown in Fig. 3, an oversteer on a right-turn maneuver occupies more space within the intersection as the vehicle encroaches on adjacent lanes in both the approach and receiving intersection legs. However, this maneuver shifts the vehicle’s swept path away from the curb and enables the implementation of a tighter curb radius and a reduced crossing distance for pedestrians.
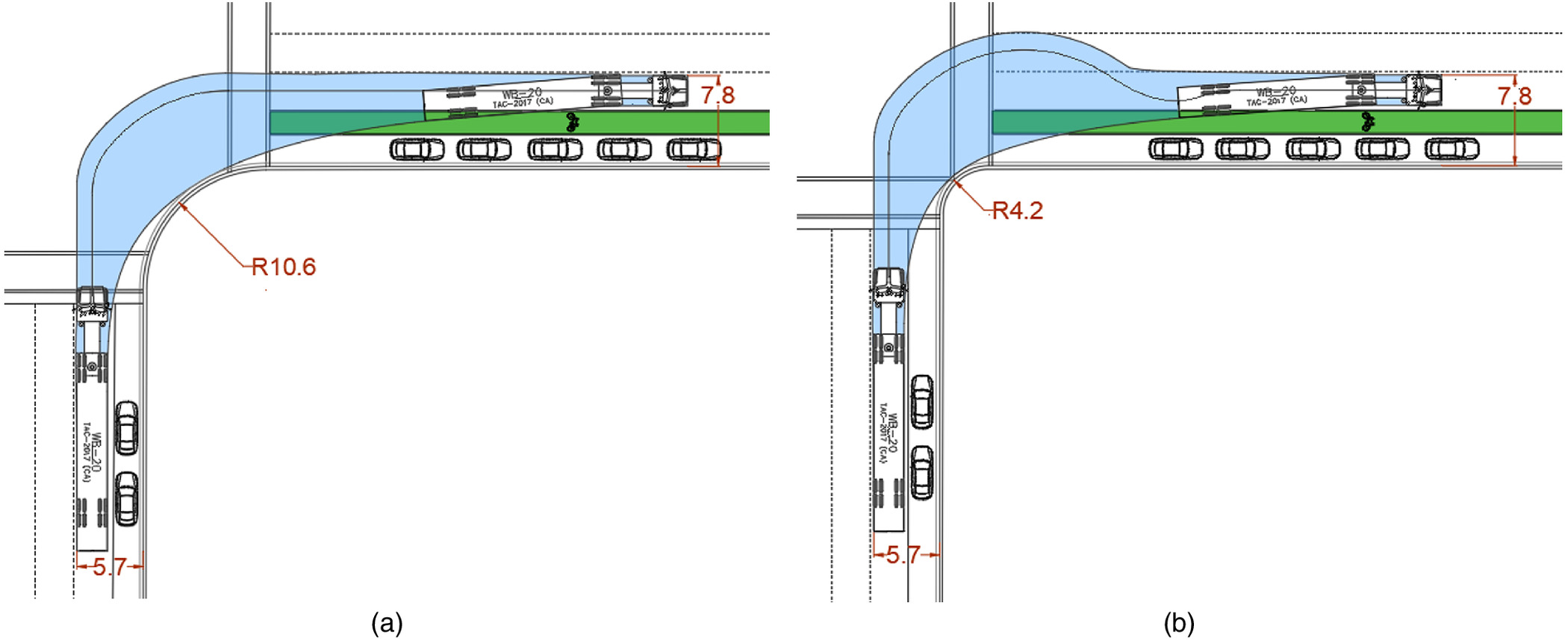
If the context zone requires designing-for or accommodating truck movements (context zones 4–9), the type of turning maneuver (i.e., with or without oversteer) must be selected depending on the walkability levels of the context zone. Neighborhoods with higher walkability levels (context zones 6 and 9) normally require more compact intersections. Thus, as indicated in Table 1, intersections in these zones should be designed with the expectation that WB20 or HSU trucks would oversteer when making the specified right-turn maneuver. In such cases, the designer must ensure that the vehicle can safely encroach on additional space through the presence of an adjacent lane or mountable median. For encroachment on an opposing lane, common design elements include a set-back stop bar, set-back median, or reshaped median nose to conform to the truck swept path. In contrast, neighborhoods with lower walkability (context zones 4 and 7) may not require compact intersections. Thus, a wider curb radius may be provided to facilitate a simple right-turn maneuver. The design and accommodated vehicles in context zones with medium walkability levels (context zones 5 and 8) are not expected to oversteer because they are allowed to occupy up to two lanes of the receiving leg.
In the AutoTURN analysis, the vehicles are oversteered with exit offsets only (i.e., no entry offsets). This indicates that, as shown in Fig. 3, there is no encroachment on additional lanes in the approach leg and that oversteering commences in the receiving leg. Specifically, a WB20 is allowed an exit offset of 3.24 m (larger than its minimum offset width of 1.76 m) to enable the vehicle to encroach on the entire width of an adjacent lane. Similarly, the HSU is allowed an exit offset of 3.24 m (equal to its minimum offset ability) to limit the vehicle encroachment to only one adjacent lane.
Step 2: Characterize the Intersection Configuration
Prior to selecting a curb radius, the designer must determine the amount of roadway space available for a truck to complete a right-turn maneuver. The distance from the face of the curb to the outer wheels of the vehicle at its start and end positions establishes the intersection approach and receiving leg widths. The effective turning radius of the vehicle (i.e., the turning radius of the inner axles) guides the determination of the curb radius required to facilitate a truck turning maneuver.
The number of lanes and lane widths on the approach and receiving intersection legs principally influence the amount of roadway space available to a turning vehicle. Wider curb lanes or the addition of buffered or unbuffered bicycle lanes and/or parking lanes provide more space between the vehicle and the curb, thus increasing the effective radius of the turning vehicle (City of Calgary 2014). This allows the designer to provide a smaller curb radius while enabling the vehicle to complete a right-turn with minimal or no constraints (TAC 2017).
In contrast, curb bulbouts (or curb extensions), a common pedestrian-friendly treatment used to narrow the roadway at pedestrian crossings, reduce the available roadway space required for a truck’s swept path as it maneuvers a right-turn (City of Calgary 2014). Although the truck-curb offset is greater due to the extension, a larger curb radius is required to accommodate truck turns. The benefits of a curb bulbout must be weighed against the benefits of providing a smaller curb radius. Curb bulbouts that reduce the pavement width can range from a minimum of 1.2 m to a preferred 2.0 m from the face of the curb. Curb bulbouts with dedicated parking lanes can extend from 2.0 to 2.8 m, with a preferred width of 2.4 m (City of Toronto 2017). Where applicable, the analysis in this paper assumes a curb bulbout width of 2.4 m with a dedicated parking lane to determine required curb radii.
Step 3: Select the Minimum Curb Radius Based on the Curb Radii Design Domain
In this step, the designer determines the curb radius based on the turning configuration (i.e., vehicle starting and ending position) and the effective turning radius of the design and accommodated vehicles as they complete a right-turn. Because the intersection curb radius must accommodate both the design and accommodated vehicles’ turning movements, the larger curb radius governs.
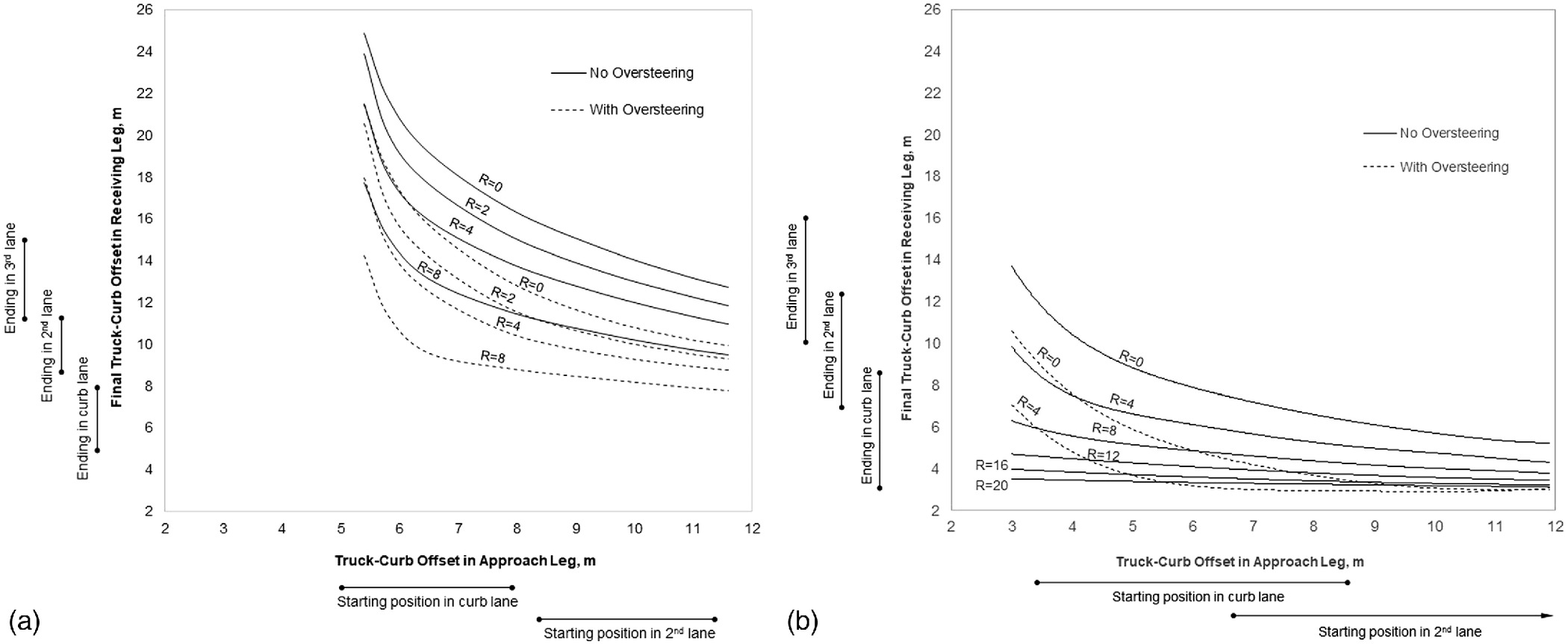
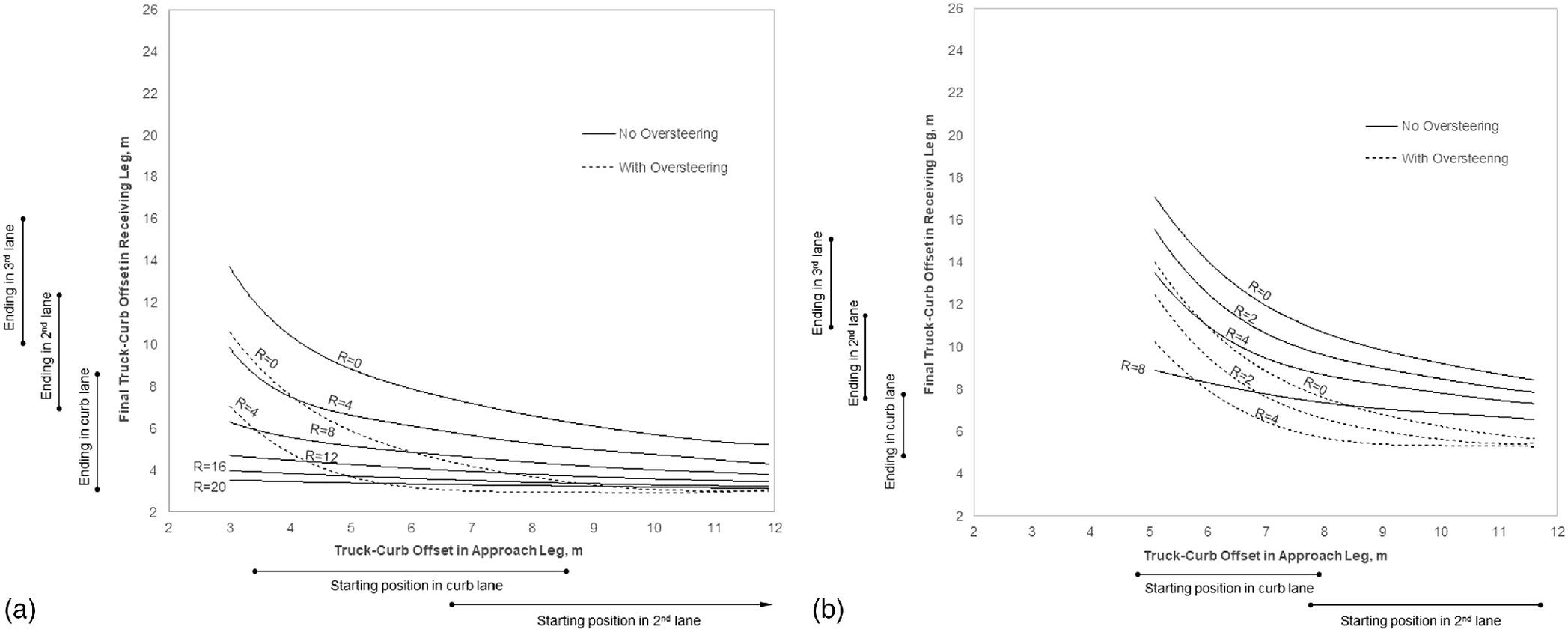
Figs. 4 and 5 show the curb radius design domain used to determine the minimum curb radius required to allow the right-turn maneuver of a design or accommodated truck. The relationships depicted in these figures are developed through a series of several hundred AutoTURN truck-turning simulations conducted for the different vehicle types, street designs, and truck-turning scenarios specified in Table 1, with a set turning speed of . As shown in the figures (and described below), the combination of street design elements and the start and end lanes of a turning vehicle determine the distance from the face of the curb to the outer axles of the vehicle (i.e., left side of the vehicle) in both the approach and receiving legs of the intersection. The simulations were conducted by placing the HSU and WB20 vehicles at different truck-curb offset distances in the approach lane depending on the starting location of the vehicle (i.e., first or second lane), lane width, and the presence of a bicycle lane, parking lane, or curb bulbout on the approach and receiving lanes. Right-turn maneuvers were simulated at intersections with varying curb radii (i.e., 0, 2, 4, and 8 m), while ensuring that the truck did not mount the curb and maintained a 0.3-m buffer between the inner axles of the vehicle and the face of the curb throughout the turning maneuver. The turning simulations were conducted with and without oversteering. Once the turn was complete, the truck-curb offset distance in the receiving lane was measured and recorded. The curb radii are single curve radii, which are most commonly used in urban areas (TAC 2017).
A designer selects the curb radius from the design domain based on four variables:
1.
Truck-curb offset in the approach leg: The distance from the face of the curb to the outer truck axles (i.e., left side of the vehicle) in the approach lane determines the truck-curb offset in the approach leg. Fig. 6 shows the approach leg truck-curb offset distance. This distance depends on whether the vehicle is maneuvering a turn from the curb lane (i.e., design vehicle) or second lane (i.e., accommodated vehicle). It also depends on the street design elements. The presence of a bicycle lane, parking lane, or combinations of those elements increases the distance between the vehicle and the curb. For example, the truck-curb approach offset for a design vehicle can range from a minimum of 3 m for a narrower curb lane (3 m) to 8.6 m for a wide curb lane (3.7 m) with a wide parking lane (2.8 m) and buffered bicycle lane (2.1 m). The truck-curb approach offset for an accommodated vehicle can range from a minimum of 6 m for narrower curb lanes (two 3-m lanes) to 12.3 m for wide curb lanes (two 3.7-m lanes) with a wide parking lane (2.8 m) and buffered bicycle lane (2.1 m). The truck-curb approach offset at an intersection with a curb bulbout can range from 4.7 to 7.9 m for a design vehicle and from 7.7 to 11.6 m for an accommodated vehicle. All width measurements follow the recommended lower and upper limits specified by Geometric Design Guide for Canadian Roads (TAC 2017), though a 3-m lane width would not normally be recommended for locations with tractor-semitrailer operations.
2.
Final truck-curb offset in the receiving leg: The distance from the face of the curb to the outer truck axles (i.e., left side of the vehicle) in the receiving lane once the turn is complete determines the final truck-curb offset in the receiving leg. Fig. 6 shows the receiving leg truck-curb offset distance. This distance depends on the final position of the vehicle in the target receiving lane but does not include the additional encroachment space required if the vehicle oversteers. The FW context zone establishes the receiving lane position of the vehicle, such that in high walkability neighborhoods, the vehicle could occupy more receiving lanes to create a more compact intersection, whereas in low walkability neighborhoods, an increased curb radius could enable the vehicle to stay in the curb lane. In addition, similar to the truck-curb offset in the approach leg, the street design elements (bicycle or parking lanes) impact the available space by increasing the distance between the vehicle and the curb.
3.
Intersection design elements: Different street design elements can affect the amount of space available for a truck to complete a maneuver. The presence of a curb bulbout reduces the space available for the swept path of a vehicle but increases the distance between the vehicle and the original face of the curb (i.e., truck-curb offset). Figs. 4 and 5 provide minimum curb radii for WB20 and HSU vehicles, respectively, at standard intersections and at intersections with curb bulbouts.
4.
Truck maneuver type: Oversteering of a vehicle shifts the vehicle turning swept path further into the intersection, away from the curb. Oversteering enables the designer to reduce the curb radius and the pedestrian crossing distance. Figs. 4 and 5 provide curb radii for both oversteering and nonoversteering vehicles.
Case Study Application: Winnipeg, Canada
This section describes a case study application of the FW relationship and the decision support tool. The study quantifies the FW relationship using data for the city of Winnipeg, Canada, and then applies the decision support tool to the intersection of Broadway and Main Street, located in downtown Winnipeg.
Quantification of the Freight-Walkability Relationship
Given the context of intersection curb radius design, this case study quantified freight activity (the abscissa of the FW relationship) in terms of peak hour right-turning truck volume and walkability (the ordinate of the FW relationship) in terms of a relative composite I. The quantification of the relationship is context-sensitive, meaning that users may define different maximum values, minimum values, and break points for the two axes of the FW relationship.
Peak hour right-turning truck volumes were estimated for combination vehicles at 640 intersections from short-duration traffic counts provided by the City of Winnipeg for the five-year period from 2014 to 2018. The typical peak hour counts did not always provide the maximum right-turning truck volume; thus, the volumes were estimated from the four consecutive 15-min count intervals that provided the maximum count from the total duration of the survey. The most recent count at a location was used, and no growth factors were applied. If available, real-time truck turning data collected using ITS technologies could provide a more accurate depiction of current truck turning activity.
The volumes were categorized into five groups based on natural breaks within the available data. The natural break categories, defined within ArcGIS, are based on a cluster analysis that maximizes variance between groups and minimizes variance within groups. Categorizing the data through a cluster analysis (i.e., natural breaks) allows jurisdictions to replicate this process to their freight context and data; thus, the freight activity scale can vary between jurisdictions. However, because natural breaks are data-driven, the results cannot be compared between jurisdictions.
The majority (69%) of the analyzed intersections had very few right-turning trucks during the peak hour (zero to two trucks per peak hour, cluster 1), 21% of the intersections had three to eight right-turning trucks during the peak hour (cluster 2), and approximately 10% of the intersections had peak hour right-turning truck volumes of nine or more (combination of clusters 3, 4, and 5, with nine to 16, 17–25, and 26–32 peak hour right-turning trucks). Freight activity in the FW matrix was categorized using these three thresholds.
A relative WI was estimated for 158 census tracts in Winnipeg using available land use and infrastructure data obtained from the City of Winnipeg and Statistics Canada. The WI was developed and quantified by defining walkability, identifying performance objectives and their indicators, and measuring the associated metrics using ArcGIS to overlay land use and transportation infrastructure spatial data. In this paper, urban walkability is defined as providing safe, accessible, and connected transportation facilities and service options to pedestrians to reach daily living destinations. Based on the stated performance objectives, Moshiri (2020) proposed a composite WI [given by Eq. (1)] as a function of measurable safety, accessibility, and connectivity performance indicators:where = spatial boundary (i.e., census tract) and , , and = designated weights for each performance objective (designated as one in this paper), depending on the relative importance placed on the objectives by jurisdictions. Selecting the relative importance of indicators involves reaching a consensus of individual stakeholder perspectives, which could change over time due to contextual factors (Miller et al. 2013). In this paper, all three walkability performance objectives represent equal contribution to the WI.
(1)
The index integrates the following data to quantify performance:
1.
Adequate/compliant pedestrian crossing control devices (a safety indicator calculated as the rate at which pedestrian crossing control types comply with the TAC Pedestrian Crossing Control Guide (2018) recommendations, assessed based on the traffic volume, posted speed limit, and total number of lanes).
2.
Residential density (an accessibility indicator calculated as the number of households per square kilometer in each census tract).
3.
Proximity to daily services (an accessibility indicator calculated as the percent of residential area within a 400-m buffer to daily destinations including grocery stores, retail stores, food outlets, schools, and entertainment).
4.
Proximity to transit stops (an accessibility indicator calculated as a weighted transit score as a function of the number of transit stops per square kilometer with headways of 10 min or less, between 10 and 20 min, between 20 and 30 min, and greater than 30 min).
5.
Connected pedestrian sidewalks (a connectivity indicator calculated as the percent of roads with sidewalk widths greater or equal to 1.5 m).
Relevant data were standardized into Z-scores to create unit-free measures prior to aggregation. The three accessibility indicators were averaged to ensure equal weights for accessibility, safety, and connectivity. Moshiri (2020) provides further details on the development and application of the WI.
Similar to the freight activity scale, the WI values for Winnipeg census tracts were divided into three natural break categories. Less than one-quarter (22%) of census tracts measured walkability levels well-below the average of zero (between and 1.37), 44% measured about average (between and 0.8), and 34% measured well-above average (between 0.8 and 5.69).
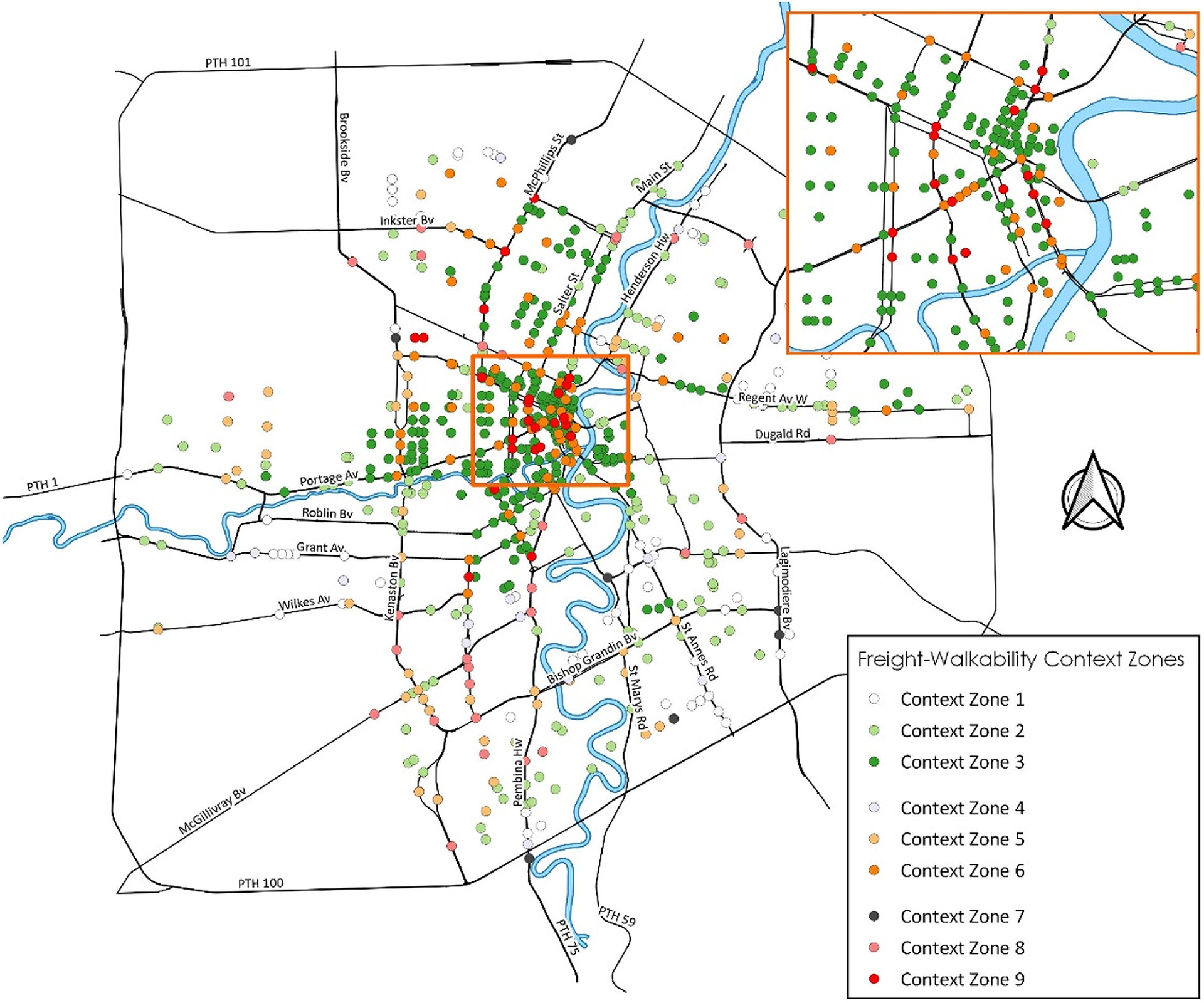
Fig. 7 shows the FW relationship with the freight activity and walkability scales conforming to the Winnipeg land use, transportation system, and truck activity contexts. Based on this, each of the 640 analyzed intersections was assigned to one FW context zone, shown in Fig. 8. Intersection points that were on census tract boundaries were manually adjusted to be associated with the census tract with the higher WI.
The quantification of the FW relationship in Winnipeg reveals the following:
•
The highest number of intersections (238 out of 640 intersections, or 37%) fall within context zone 3, with high walkability and low truck turning activity, followed by context zones 1 and 2 at 10% and 22%, respectively.
1.
It is evident by the location of the intersection counts that most of them are conducted in more central areas of the city, and few counts are conducted in the outskirts where there are lower walkability and higher freight activity levels. This may influence the distribution of intersections by context zone.
2.
Intersections in context zone 1 that have low truck turning activity and low walkability comprise about 10% of the intersections. These intersections are typically in highly residential areas with no land use diversity that see minimal large truck activity, or areas with higher truck activity where truck-turning operations are limited to a main intersection in the area.
3.
Context zone 9, which is the most diverse area with high truck turning volumes and walkability, accounts for 4% of the analyzed intersections. These intersections are primarily in the city center, which comprises the most multimodal network and mixed-use area.
4.
The diverse intersections with high walkability and moderate to high truck turning activity (i.e., red and orange points) primarily occur along the main city arterials.
5.
In the city center, a diverse intersection (context zone 9) is found next to a highly walkable intersection with no truck activity (context zone 3), as trucks are routed through specific intersections or only able to turn at certain one-way streets. Similarly, the designation of truck routes sometimes indicates that intersections within close proximity might be assigned to contrasting zones (e.g., context zones 7 and 1).
Application of the Decision Support Tool
The case study applied the decision support tool to assess the design of the northwest curb radius at the intersection of Broadway and Main Street, located in downtown Winnipeg. Fig. 9 provides a schematic of the intersection. The existing curb radius is 7.0 m. The application of the tool proceeded as follows:
1.
Step 1: As described in the foregoing section, this intersection was assigned to context zone 9, because it is characterized by both high freight activity (11 peak hour right-turn movements by trucks) and relatively high walkability ().
2.
Steps 1a and 1b: Based on its context zone and referring to Table 1, this intersection should enable a right-turning WB20 design vehicle to start its maneuver from the curb lane in the approach leg and to occupy two lanes in the receiving leg while oversteering.
3.
Step 2: As shown in Fig. 9, the curb lane on southbound Main Street is 3.3 m wide, and westbound Broadway includes a parking lane, plus two travel lanes, for a total width of 8.7 m.
4.
Step 3: Using these dimensions, the appropriate curb radius was selected using the curb radius design domain provided in Fig. 4(a). The figure indicates that a minimum curb radius of 9.2 m is required to facilitate this maneuver while maintaining a 0.3-m buffer to the curb, based on a truck-curb offset distances of 3.3 and 8.7 m in the approach and receiving legs, respectively.
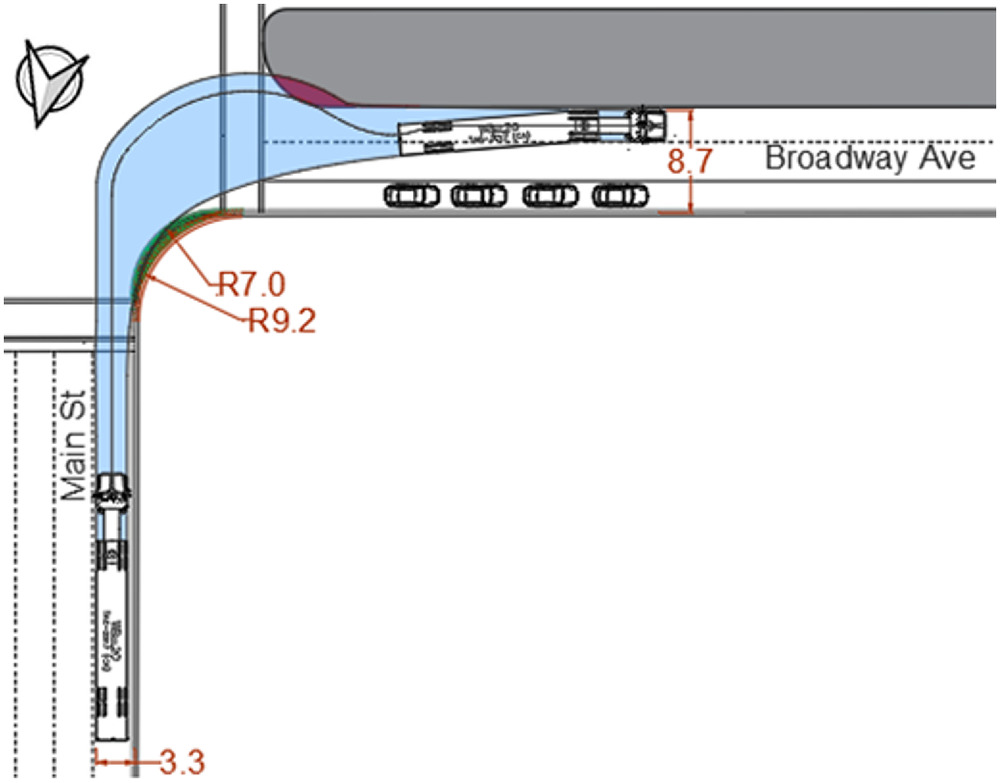
The decision support tool revealed that the existing curb should be set back by increasing the curb radius from 7.0 to 9.2 m to accommodate this vehicle maneuver. Alternatively, the designer could modify the truck-curb offset distances by adjusting the intersection design elements. In addition, the existing median should be set back or modified to conform to the swept path of the oversteering WB20 design vehicle.
Discussion
Conceptually, the decision support tool aligns with the shift towards performance-based geometric design—emerging in the United States—and the design domain concept which has been implemented in Canadian practice since the late 1990s. These approaches offer considerable flexibility for the designer while revealing trade-offs associated with the selection of various geometric design elements. When applying the decision support tool developed in this paper, a designer can adjust the boundaries of the FW context zone to suit local conditions and can select values for four street design variables, namely: curb radius, approach leg offset, receiving leg offset, and type of vehicle maneuver. Moreover, the designer may choose to adopt the methodology to select a curb radius suitable for the existing or desired FW context zone of an intersection or may adjust the truck-curb offset in the approach or receiving legs (i.e., modify the intersection design elements) to allow the right-turn maneuver of a truck at a set curb radius. The designer can also verify the type of truck maneuver and turning configuration required at an existing intersection and determine whether it is suitable to the actual context of the area. In this case, the designer can choose to adjust the street design elements to allow a more suitable truck maneuver at the intersection or modify the area’s context zone through changes in the urban form. Evidently, use of the tool relies on the experience and judgment of the designer, as does any design aid that explicitly facilitates flexibility in selecting design parameter values.
The FW context zones categorize areas across an urban jurisdiction by their relative levels of freight activity and walkability, thus helping planners and engineers to prioritize areas for possible design improvements. Areas with high freight activity and high walkability levels (i.e., context zone 9) could be considered top priority for design improvements due to the greater interaction between trucks and pedestrians. Areas with either high truck activity and moderate walkability levels (i.e., context zone 8) or high walkability levels and moderate truck activity (i.e., context zone 6) could be considered secondary. At the investment programming stage, cost-related variables could also be considered to support prioritization decisions, even amongst intersections within the same context zone.
An intersection’s FW context zone may change in response to different levels of walkability and/or freight activity at the intersection over time. On a short-term basis, designers can make street-level changes to improve the level of street connectivity or enhance pedestrian crossing control treatments to improve the walkability levels of an area. Alternatively, there may be opportunities to alter truck activity through regulatory restrictions on truck operations at an intersection (e.g., prohibiting truck turning maneuvers at an intersection).
Regardless of how a designer applies the decision support tool, it is important to conduct the analysis for each leg of an intersection, because each approach could fall into a different context zone. Moreover, the design of each approach, based on its individual truck turning and walkability needs, could impact the space available for truck turning needs in another approach. If the required space is unavailable for the truck maneuver types required for each approach or other geometric constraints impede the maneuverability of the truck, truck rerouting may be necessary through regulatory restrictions.
The decision support tool and the measurement of the FW relationship are subject to limitations that should be considered during implementation. Selecting the appropriate context zone is a critical first step in making a performance-based design decision using the developed tool. The context zone can be selected based on existing conditions; however, judgment should be used in ensuring that the measured context zone is representative of the area. In this paper, because walkability is measured based on infrastructure and land use characteristics rather than pedestrian activity or demand, areas with poor infrastructure but high pedestrian demand may require an upgrade of the pedestrian infrastructure to improve walkability levels and achieve a more appropriate context zone prior to following the remaining steps in the decision support tool. City-wide pedestrian volumes were not readily-available for this research; however, with advancements in pedestrian count collection efforts, future research could use pedestrian volumes to help measure walkability levels. Alternatively, desired context zones can be selected based on an understanding of the area’s pedestrian activity or community goals; thus, measurement of the FW relationship is not required.
Moshiri (2020) found that most CS designs minimize the curb radius at an intersection, typically to a 3-m radius, to limit pedestrian crossing exposure. Some guides additionally recommend a maximum radius of 9–12 m in locations with high large-truck activity. This paper finds that the typically recommended CS curb radius of 12 m for areas with truck activity facilitates the right-turn maneuver of a tractor-semitrailer at a standard intersection from the curb lane if it is oversteering and occupying multiple receiving lanes. This turning configuration is suitable for areas with both high freight and pedestrian activity. However, areas where trucks are the modal priority and where there is some level of pedestrian activity may require larger curb radii to allow the maneuver of a truck with fewer constraints (e.g., enabling the truck to turn from the approach curb lane to the second receiving lane). In contrast, at locations where pedestrians are the modal priority but which have moderate truck activity, a reduced curb radius would be more suitable to accommodate the truck turning maneuver while ensuring pedestrians have a reduced crossing distance. For example, the vehicle can complete the turn starting from the second approach lane and occupy multiple receiving lanes with oversteering. Adding bicycle lanes or parking lanes would reduce the required curb radius in both scenarios, but would introduce potential conflicts between turning trucks and cyclists.
This paper finds that the recommended CS curb radius of 3 m is appropriate in areas with pedestrian priority and no large-truck activity. However, a 3-m curb radius still requires a light single unit vehicle (i.e., van type delivery vehicle) to maneuver with a slight oversteer when completing a curb to curb right-turn at a standard intersection, whereas a 5.5-m radius is required to allow the delivery truck to make a right-turn with no constraints. Because transit operation is common in walkable neighborhoods, this radius would be too restrictive for a transit bus to maneuver the right-turn with no constraints. However, walkable areas typically have bicycle lanes and on-street parking which would increase the truck-curb offsets, thus allowing the curb radius to be reduced and facilitating right-turning trucks. Because they can be larger than single unit delivery vehicles, transit vehicles (or in some areas, school buses) may be considered as the design or accommodated vehicle when selecting an appropriate curb radius in residential areas with frequent bus activity but low truck activity.
Conclusion
Pedestrian-friendly design initiatives, specifically CS design guidelines, emphasize the integration of land use context within a street typology. The land use/street typology guides planning and design decisions to develop a street or area by considering the contextual factors beyond simply the function of the roadway. However, few CS guidelines discuss truck accommodation other than in industrial areas, and those that do, largely disregard the needs of trucks in geometric design. The few guides that consider trucks in curb radius design provide general ranges or prescriptive maximum curb radii values for areas with high truck activity, thus not considering the variations and diversity of land use and modal activity that can occur in urban areas.
This paper makes three contributions to address this knowledge gap. First, it develops a novel decision support tool that integrates land use and transportation mobility to guide the design of urban intersection curb radii through a context-sensitive, performance-based decision-making process. That process specifically considers the relative levels of freight activity and walkability in an urban area. Second, the paper conceptualizes the FW relationship as a fundamental component of the decision support tool and demonstrates its potential application in the context of curb radius design. A designer can adjust the street design elements to accommodate a truck turn suitable for the location’s context zone (namely through curb radius, approach leg offset, receiving leg offset, and type of vehicle maneuver), modify the area’s context zone through changes in the urban form, or select a curb radius suitable for the existing or desired FW context zone of an intersection. Third, based on a series of truck turning simulations, the paper proposes design domains for prominent truck configurations and intersection designs commonly applied within CS initiatives (e.g., bicycle lanes, curb bulbouts). In this way, the recommended curb radii extend existing CS guidance by more explicitly considering the needs of trucks, where appropriate.
The case study presented in the paper demonstrates the quantification of the FW relationship in terms of the peak hour right-turning truck volume and WI at 640 intersections in Winnipeg, Canada. Subsequently, the study applies the decision support tool to select the curb radius at an existing intersection in Winnipeg, based on that intersection’s context zone and street design characteristics. The different methods of utilizing the tool by the designer are discussed to illustrate the flexibility of a design domain approach to provide a context-sensitive geometric design suitable for existing or desired conditions.
The decision support tool and the underlying FW relationship is transferrable to other urban contexts and design parameters. Although the tool was developed to guide the selection of a curb radius suitable to the context of an urban environment, it can also guide transportation engineers and planners to accommodate both pedestrians and trucks through both short-term street-level design changes (e.g., related to curb radius, street connectivity, and pedestrian crossing control compliance) and long-term land use transformations (e.g., residential density and land use mix).
Data Availability Statement
Some or all data, models, or code generated or used during the study are available from the corresponding author by request. These include the truck turning simulation outputs and the data used to quantify the FW relationship in Winnipeg, Canada.
Acknowledgments
This research was financially supported by the Natural Sciences and Engineering Research Council (NSERC) and the Canadian Institute of Transportation Engineers (CITE). The data for the case study were provided by the City of Winnipeg and Statistics Canada.
References
Appleyard, B., C. E. Ferrell, and M. Taecker. 2016. “Toward a typology of transit corridor livability.” Transp. Res. Rec. 2543 (1): 71–81. https://doi.org/10.3141/2543-08.
Bassok, A., C. Johnson, M. Kitchen, R. Maskin, and K. Overby. 2013. NCFRP Report 24: Smart growth and urban goods movement. Washington, DC: Transportation Research Board.
City of Calgary. 2014. Complete streets guide. Calgary, Canada: The City of Calgary.
City of Portland. 2008. Designing for truck movements and other large vehicles in Portland. Portland, OR: City of Portland Office of Transportation.
City of Toronto. 2017. Road engineering design guideline: Curb radii guideline. Toronto, Canada: City of Toronto Transportation Services.
Conway, A. 2018. Complete streets considerations for freight and emergency vehicle operations. New York: New York State Energy Research and Development Authority.
FDOT (Florida DOT). 2015. Freight roadway design considerations. FDOT.
FHWA. 2010. Livability in transportation guidebook: Planning approaches that promote livability. Washington, DC: USDOT.
Harwood, D., D. Torbic, K. Richard, W. Glauz, and L. Elefteriadou. 2003. NCHRP Report 505—Review of truck characteristics as factors in roadway design. Washington, DC: Transportation Research Record.
Miller, H., F. Witlox, and C. Tribby. 2013. “Developing context-sensitive livability indicators for transportation planning: A measurement framework.” J. Transp. Geogr. 26 (Jan): 51–64. https://doi.org/10.1016/j.jtrangeo.2012.08.007.
Moshiri, M. 2020. “A decision support tool for accommodating truck turning movements at intersections in walkable communities.” Ph.D. dissertation, Dept. of Civil Engineering, Univ. of Manitoba.
Musunuru, A., R. J. Porter, T. Sayed, and M. Fyfe. 2019. “Risk and reliability analysis of geometric design criteria: A critical synthesis.” Transp. Res. Rec. 2673 (3): 386–398. https://doi.org/10.1177/0361198119834298.
NACTO (National Association of Transportation Officials). 2013. Urban street design guide. New York: NACTO.
Neuman, T., R. Coakley, S. Panguluri, and D. Harwood. 2017. NCHRP 839—A performance-ased highway geometric design process. Washington, DC: Transportation Research Board.
OECD (Organisation for Economic Cooperation and Development). 2003. Delivering the goods: 21st century challenges to urban goods transport. Paris: OECS.
Sahu, P., A. Chandra, A. Pani, and B. Majumdar. 2020. “Designing freight traffic analysis zones for metropolitan areas: Identification of optimal scale for macro-level freight travel analysis.” Transp. Plann. Technol. 43 (6): 620–637. https://doi.org/10.1080/03081060.2020.1780711.
Smart Growth America. 2016. “National complete streets coalition.” Accessed May 1, 2019. http://www.smartgrowthamerica.org/complete-streets/who-we-are.
TAC (Transportation Association of Canada). 2011. Pedestrian crossing control guide—Technological knowledge base. Ottawa, Canada: TAC.
TAC (Transportation Association of Canada). 2017. Geometric design guide for Canadian roads. Ottawa: TAC.
US DOT. 2000. Comprehensive truck size and weight study. Washington, DC: USDOT, FHWA.
Williams, K., and A. Carroll. 2015. Integrating freight into livable communities. Portland, OR: National Institute for Transportation and Communities.
Wygonik, E., A. Bassok, A. Goodchild, E. McCormack, and D. Carlson. 2015. “Smart growth and goods movement: Emerging research agendas.” J. Urbanism: Int. Res. Placemaking Urban Sustainability 8 (2): 115–132. https://doi.org/10.1080/17549175.2013.875058.
Young, E., and V. Hermanson. 2013. “Livability literature review: A synthesis of current practice.” In Proc., TRB 92nd Annual Meeting Compendium of Papers. Washington, DC: Transportation Research Board.
Information & Authors
Information
Published In

Journal of Transportation Engineering, Part A: Systems
Volume 148 • Issue 10 • October 2022
Copyright
This work is made available under the terms of the Creative Commons Attribution 4.0 International license, https://creativecommons.org/licenses/by/4.0/.
History
Received: Sep 22, 2021
Accepted: Mar 18, 2022
Published online: Jul 21, 2022
Published in print: Oct 1, 2022
Discussion open until: Dec 21, 2022
Authors
Metrics & Citations
Metrics
Citations
Download citation
If you have the appropriate software installed, you can download article citation data to the citation manager of your choice. Simply select your manager software from the list below and click Download.
Cited by
- Cesar Oswaldo Vera Luna, Milagros Yolanda Gavilano Esquivel, Manuel Silvera, Fernando Campos, Evaluation of the influence of the turning radius of heavy vehicles inside a roundabout in vehicular conflicts, 2023 Congreso Internacional de Innovación y Tendencias en Ingeniería (CONIITI), 10.1109/CONIITI61170.2023.10324050, (1-5), (2023).